
TL;DR
A hobbyist designed and tested a DIY robot actuator capable of high torque and speed. While initial results show limitations, the project demonstrates potential for future revisions and open-source sharing.
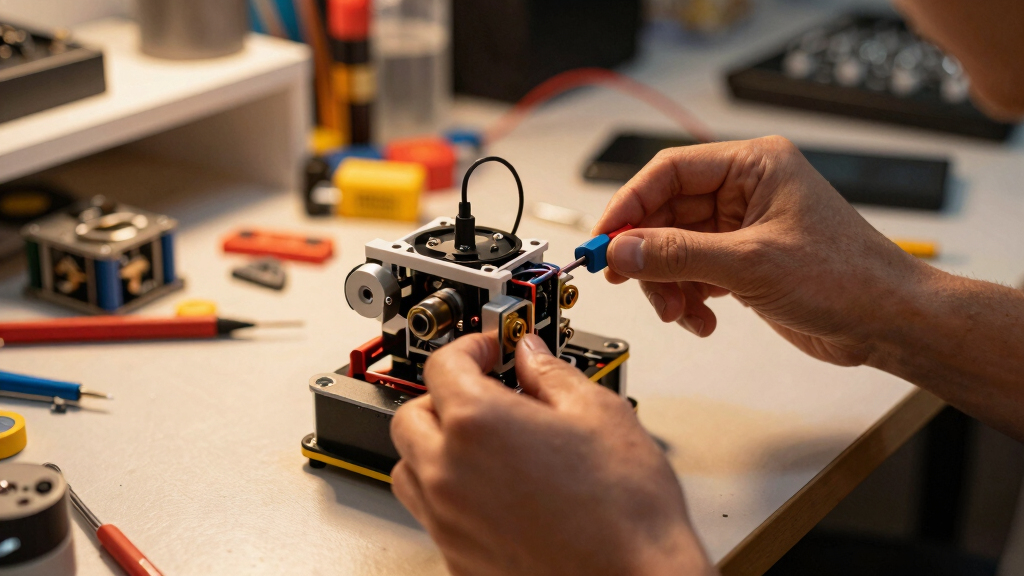
A hobbyist has built and tested a custom robot actuator inspired by MIT research, achieving partial success but encountering torque and backlash issues. The project aims to contribute to DIY robotics development and shares CAD files for community use.
The builder targeted an actuator capable of 40-60 rpm and 20 Nm of torque for continuous operation. The design replaces an MIT-inspired planetary gearbox with a cycloidal gearbox, aiming for better torque capacity with less backlash. Testing on a benchtop power supply achieved only 7 Nm of torque, limited by current capacity. The prototype also exhibited excessive backlash due to manufacturing tolerances, and the overall construction cost exceeded $400, which is above initial budget estimates. Despite these setbacks, the builder plans to refine the design in future versions, with CAD files openly available for community collaboration.
Implications for DIY Robotics and Actuator Development
This project highlights the challenges and potential of custom-built robot actuators for hobbyists and researchers. While current limitations exist, such as torque shortfalls and backlash, the open-source approach and iterative testing exemplify how accessible design and manufacturing can advance robotics innovation outside commercial labs. The effort underscores the value of community-driven development in pushing the boundaries of DIY robotics technology.

EMOZNY Emo Smart Robot Car Chassis Kit with Motors, Speed Encoder and Battery Box for DIY
Ideal for DIY, Multi-function and Various kinds of positioning holes
As an affiliate, we earn on qualifying purchases.
As an affiliate, we earn on qualifying purchases.
Background on DIY Actuators and Robotic Motion Components
Building custom actuators has become increasingly popular among robotics enthusiasts aiming to create humanoid robots and other complex machines. Inspired by academic research, hobbyists often adapt industrial concepts for personal projects. This particular build draws from an MIT research paper, which proposed using cycloidal gearboxes for improved torque and backlash performance. Prior DIY actuator projects have demonstrated the feasibility of small-scale motors, but achieving industrial-grade torque and durability remains challenging for hobbyists due to material and manufacturing constraints.
“The project demonstrates the potential for low-cost, open-source actuator designs, but also highlights the importance of precise manufacturing for optimal performance.”
— an anonymous researcher

STEPPERONLINE 51:1 Planetary Gearbox High Torque Nema 17 Stepper Motor Precision Camera DIY
High Torque Low Speed
As an affiliate, we earn on qualifying purchases.
As an affiliate, we earn on qualifying purchases.
Unresolved Challenges in Torque and Backlash Performance
It remains unclear whether future revisions will successfully address the backlash caused by manufacturing tolerances or significantly improve torque output with better power supplies. The durability and long-term reliability of the design are also still to be tested in real-world applications.

RV Precision Gear Reducer Cycloid Pin Wheel Industrial Robot Arm Joint Special(RV160E (Bare Metal))
Precision Motion Control: The cycloidal gear design provides exceptional torsional stiffness for robotics and automation applications
As an affiliate, we earn on qualifying purchases.
As an affiliate, we earn on qualifying purchases.
Planned Revisions and Community Collaboration Efforts
The builder plans to refine the gear tolerances, explore alternative materials, and upgrade the power supply to boost torque. Open-source CAD files will facilitate community input and collaborative improvements. Further testing is expected as revisions are implemented, potentially leading to more robust DIY actuators for robotics enthusiasts.

High Torque AC Motor + Speed Controller + Gear Box, 250W Single Phase Electric Motor with Gearbox, Variable Speed Motor, Reversible Gear Motor with Control Box, 110V Geared Motor
High torque: induction motor has a torque of 16nm, suitable for applications that require a lot of power,…
As an affiliate, we earn on qualifying purchases.
As an affiliate, we earn on qualifying purchases.
Key Questions
What materials are used in this DIY actuator?
The stator is hand-wound with an off-the-shelf core, while the housing and gear components are made from CNC-machined and 3D-printed parts.
How does this build compare to commercial actuators?
While it offers a low-cost, customizable alternative, it currently falls short of industrial standards in torque and backlash performance but serves as a valuable proof of concept.
What are the main limitations of this prototype?
The primary issues are limited torque output due to power supply constraints and excessive backlash caused by manufacturing tolerances.
Will the design be available for others to build?
Yes, the CAD files are openly available online for community use and further development.
What are the next steps for this project?
The builder plans to improve gear tolerances, upgrade power supplies, and perform more extensive testing to enhance performance and reliability.
Source: Hackaday







